


L2+,正式成为了自动驾驶的主战场;安霸 (Ambarella) 的策略,跟市场的大趋势形成了步调一致的节奏。
2015年,安霸以3000万美元的价格收购了意大利公司VisLab,正式踏入了自动驾驶的赛道;此后经过三年的时间,安霸一直在自动驾驶芯片上蓄力;从2017年开始,安霸每年都在CES上亮相一款新的自动驾驶产品。
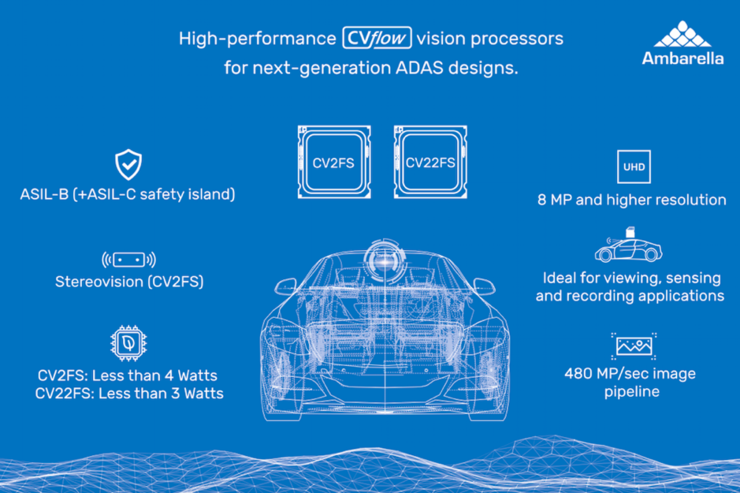
今年CES,安霸发布了两款适用于汽车摄像机和高级驾驶辅助系统(ADAS)的系统芯片CV22FS和CV2FS ,基于CVflow®架构进行人工智能处理,符合汽车行业严苛的芯片级ASIL-B 功能安全标准。
据了解,CV22FS 和 CV2FS 拥有超低功耗,能够满足汽车厂商在汽车前挡风玻璃上安装单体式ADAS 摄像机的功耗要求。芯片还可应用于盲点检测(BSD)的电子后视镜、驾驶员及舱内监控摄像机以及智能辅助停车全景泊车影像系统(APA)等产品中。
和大多数的自动驾驶芯片公司不一样, 安霸在技术路线上选择两条腿走路,既开发了高性能的CVflow®以运行高效率的神经网络,又支持高性能的双目立体视觉,两种来源不同的视觉技术可以互为补充。
业内普遍认为双目立体摄像头颇是一条充满着争议且艰难的路线,安霸如何要用产品充分证明双目的可行性呢?
安霸半导体意大利总经理、VisLab 创始人、帕尔马大学计算机工程教授 Alberto Broggi ,了解安霸的双目立体视觉背后的底气和技术路线。

ADAS市场
2019年,ADAS市场是一个被点燃的市场;这一年,Mobileye的 ADAS 贡献了10亿美元的营收。
市场广阔,ADAS将是下行的汽车市场当中,一剂拉升的良药;而今年安霸所聚焦的赛道也是L2+,基于CVflow®架构进行深度学习加速,并符合汽车行业严苛的 ASIL-B 功能安全标准。
商业策略上,安霸有 CVflow® 和 Stereo Vision 两个法宝,不论是单目还是双目的视觉感知系统,都可以得到很好的支持,安霸做出了最贴合市场需求的策略。其中双目立体视觉技术目前可作为一种“高级技术储备”,其技术门槛高,但前景广阔。作为一家芯片公司,安霸在深度学习加速和双目立体视觉算法方面的独到之处,有助于提升系统综合性能和安全级别,使得系统更加接近于L3。
由于汽车的环境非常特殊,汽车行驶过程中容易造成双目摄像头,两个镜头之间产生位置、角度变化,从而造成深度检测准确度下降,这也是绝大多数自动驾驶技术研发公司不选择双目的主要原因之一;
事实上,双目所采集到的信息量远比激光雷达扫描的信息量要多很多,相比起单目,双目就像人的双眼,能够更为精准地测距。
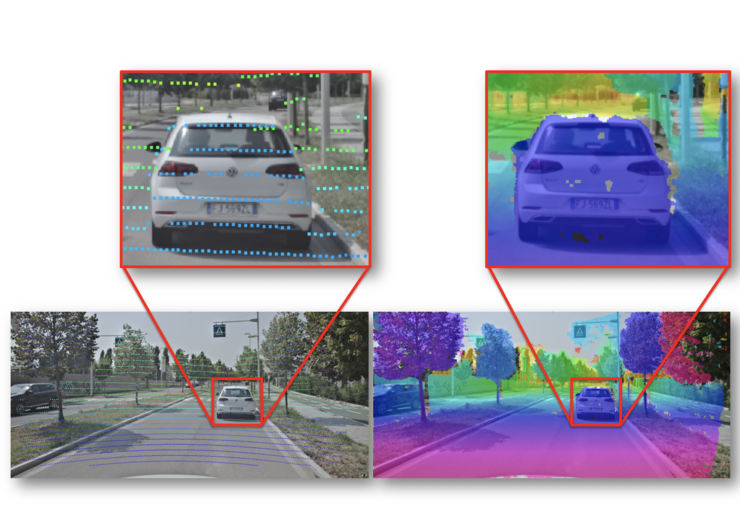
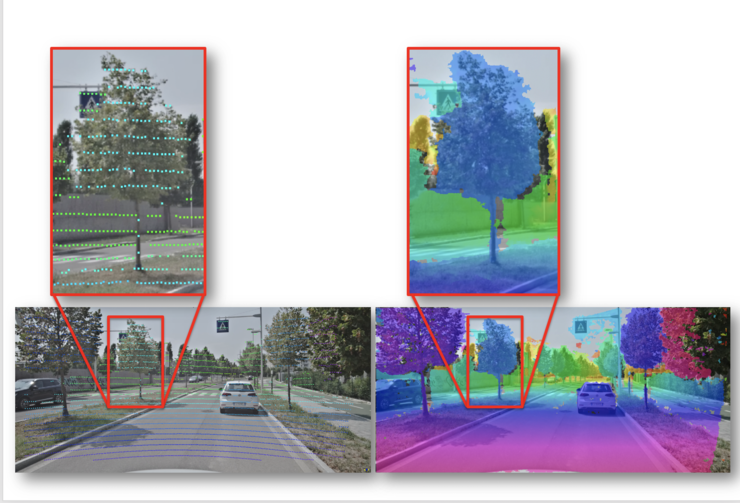
这背后有着物理原因——激光雷达所使用的光是近红外的波段;摄像头是可见光波段,可见光波段和近红外的波长非常相似;然而安霸的双目摄像头所生成的点云,要比激光雷达所生成的点云要密集得多。以下是激光雷达和安霸的双目立体视觉系统在同等条件下声称的点云效果的对比:

2015年,安霸所收购的由Broggi 教授所创办的Vislab,最为擅长解决的正是双目立体感知系统。而对于这个问题,安霸从硬件端以及算法端进行解决。
Broggi 说:在CV2FS内设计了一款专门针对双目视觉算法的硬件 —— SPU,专门处理复杂的双目立体视觉计算,能够做到以800万像素双目实时、准确地计算出物体的形状、物体的大小。
双目立体视觉的两个摄像头的一致性很重要,一有偏差就会影响识别。在算法端,安霸针对于汽车的环境,设计了动态标定的算法,这个算法可以实时地检测在行车过程中,两个摄像头之间是否产生了偏差。对于允许范围内的偏差,安霸的动态标定算法可以进行自动纠正,从而使得双目立体视觉的精度能够保持一致,保证了行车过程中的安全。对于行驶过程当中会遇到的复杂光线问题,安霸也设计了专门的图像处理硬件可以做高动态、3D降噪技术来解决相应的问题。
市场是一切技术的试金石,只有不适应市场的技术,没有不适应技术的市场。独特的技术路径也为安霸赢得了市场的信任。
安霸的 CVflow® 引擎展示了高效的神经网络加速能力,低功耗,和广泛的神经网络支持,全球有更多的合作伙伴使用 CVflow® 开发了不同的深度学习算法,有几个车规项目进入批量生产。
Hella Aglaia 将推出搭载了安霸 CV22 芯片的 CVflow® 引擎加速的最新的深度学习 ADAS 算法套件,包括多类别目标检测与分类、自由行驶区域检测、深度估算以及交通灯和交通标志识别,用于单体、前向的 ADAS 视觉感知。
除了 Hella 以外,韩国算法公司 StradVision 也展示了其搭载了单颗 CV22 芯片实现前向 ADAS 和驾驶员监控系统(DMS)算法套件,这套系统安装在一辆乘用车上,仅仅使用一个800万像素的前向摄像头和一个舱内摄像头。
更广阔的L4级市场
对于芯片而言,架构非常重要,在现行的自动驾驶算法,都严重依赖于神经网络。
不同于 CPU、GPU 以及 FPGA,安霸芯片的 CVflow® 对运行神经网络进行了特殊的优化,能够实现多种多样的计算机视觉功能,这一架构能够推出,仰赖的是安霸研发团队多年的对深度学习的芯片实现进入深度分析、探究,并借鉴了 VisLab 对视觉感知算法的多年累积而成。
一直以来,如何平衡灵活性以及芯片的成本效益都是业界的难题。
Broggi 告诉新智驾:“ 除了设计针对双目视觉算法的硬件 SPU 以外,安霸还有设计了一个特征提取的模块——作为基础性的硬件支持,这样效率最快。安霸的SoC设置非常灵活,有的是固化的硬件,有的是可编程可改动的软件部分。这样的设计既能体现出硬件模块优势,同时又能提供灵活的模块支持开发者开发。”
而安霸所固化的硬件部分,事实上,也是经过多年以来的迭代。从安霸的CV1 就开始进行无人驾驶路测,通过真实的上路经验,都使得后续在芯片迭代之时,清晰地知道哪些硬件应该升级、哪些模块需要修改。
早在2018年开始,安霸就开始在硅谷进行自动驾驶的路测。据Broggi 教授告诉新智驾:“ 目前,硅谷自动驾驶车队车上正在跑的是CV2的芯片,与安霸的上一代CV1芯片相比,CV2提供所需的计算能力是其20倍,基于CV2的这些经验也将会反哺到下一代的芯片当中。“
今年,安霸更是做了一个大胆的决定,向市场推出符合 ASIL 安全标准的 CVflow® 芯片CV22FS 和 CV2FS ,可为汽车主机厂和软件开发合作伙伴提供一个开放平台,实现差异化设计和高性能汽车系统开发。
事实上,在更为高阶的自动驾驶历程当中,安霸也有所部署,Broggi 向新智驾表示:未来安霸L4级自动驾驶芯片不仅仅只是负责感知层的功能,还将融合决策、控制于一体。
一次试乘
在CES 上,安霸展示了一系列的芯片产品矩阵。
其中安霸的CV2 芯片能够在夜间的环境下,精准地用双目立体视觉对障碍物进行精准框定,能够识出车道线、行人、红绿灯、交通标志等等的重要交通要素。
为了体现 CV2 芯片的独特性能,安霸将竞争对手英伟达的同类产品—— Xavier 拿到现场进行了对比演示,两台设备运行同一个网络,性能和准确度相当,但CV2 的系统板总功耗比Xavier系统板的四分之一还要低。
除了展现在芯片的算力储备以外,安霸也在CES上秀了一把在L4级自动驾驶的肌肉,安霸在场馆外安排了一辆仅靠视觉感知实现的的自动驾驶车辆,新智驾也进行了试乘。该自动驾驶汽车搭载了安霸低功耗的SoC芯片,摄像头作为主传感器,毫米波雷达作为冗余,没有使用激光雷达,并且在CES期间在繁忙的拉斯维加斯的街头上自由地穿梭。

安霸的自动驾驶车辆先在拉斯维加斯的街头进行地图的采集,在行驶的过程当中,利用视觉元素进行不断的地图更新。在安霸的自动驾驶车辆当中,前后座的乘客皆有一块屏幕显示周围的环境——Bounding box会框住不同的障碍物,不同的颜色色块代表距离的远近。
在车辆等待红绿灯之时,自动驾驶汽车的摄像头能够精准地识别红绿灯的状态,车辆根据摄像头的感知结果,马上进行相应的决策和规划。整个试驾过程约为10分钟,并没有出现任何一次的接管情况,驾驶过程流畅。
Broggi 向新智驾表示: “这辆L4级自动驾驶汽车里系统所采用的主芯片,系统控制板,自动驾驶算法,以及实际装车都是由安霸独立完成的,这个在半导体企业里面并不多见。这个自动驾驶演示说明了安霸半导体在相关的技术领域已具有完整的知识储备。 ”
总结
从 GoPro 起家,近年来,安霸的转型之战颇为成功,先后在安防、汽车及自动驾驶都取得了不俗的成绩。每一年以稳定的节奏进行产品的更新和迭代。
2020年的ADAS市场,是一个增量的市场。在这个市场当中,有老牌的厂商、也有新兴入局的选手。安霸如何通过低功耗、高算力,开拓出另一个商业上的成功,也是一桩值得期待的事情。
本站部分文章来自互联网,文章版权归原作者所有。如有疑问请联系QQ:3164780!