

01 机器人的人工智能
机器人是由什么组成的,它与机器又有什么不同呢?这个问题的答案在过去80年间已经发生了变化。类人自动机,如Rossum’s Universal Robots和The Metropolis中的那些,就是以人体为模型的,但缺乏平滑的人体特征和肢体方向,也缺少人类情感。
随着工业和制造业的发展以及生产线和汽车工业的自动化,机器人的概念或多或少被局限于从事重复的“拿和放”作业的机械手臂。用于移动和其他比较高级的用途(如导航、简单行为、社交作用等方面)的机器人,在Walter的海龟之后才开始有起色。
不同于工业机械臂,人工智能机器人会对本地环境进行导航和探索,具有明显的智能,很多时候是为了完成特定的任务或作为特定角色的,如探索机器人、家用机器人、搜救机器人等。
Bekey提出了以下机器人定义:
……机器人是一个机器,在世界上感觉、思考、行动……
这个定义并没有与给定的任务相关联,也没有突出机器人与环境的交互。因此以下4类机器人都被此定义涵盖了:
- 从事重复性工作的机器人,如工业级机器人和机械手臂;
- 那些缺少明确指令的机器人,如火星探测器;
- 社交机器人领域的那些有着人类外观的自动机或类人机器人;
- 通过扩展生物技术制造的未来机器人,如Android机器人和半机器人。
这个定义不局限于普遍接受的机器人机电一体化的设计,即通过处理单元将机械和电子进行了融合。然而,工程方向的角度倾向于限制这个定义,即机器人应该有电子、机械硬件以及处理单元。没有电子和处理单元的驱动更多是在自动机领域,由压缩弹簧、气动阀和/或液压控制,比如Philon设计的那些以及日本的Karakuri木偶。
自那之后,机器人的定义就基于它们参与实际任务的能力,没有外在控制,人们倾向于认为机器人真的在“思考”,因为它处理来自传感器的数据到处理单元的动作与人类大脑的工作方式很相似。尽管这仅仅是执行代码段,本质上并非思考。
机器人的特定目标可以是具体的,如线跟踪、光线追踪或捡起空可乐瓶,也可以是朝着预定的方向迈进的一系列杂务,如军事机器人、护士机器人、家政服务机器人或者办公室助理机器人。
Murphy给出了一个更以人工智能为中心的定义:
一个可以自主运作的机械生物。
这个定义特别提到“生物”,和拟人论一致,也和Toda与Wilson的作品相吻合。不言而喻,它也暗示着自主功能和智能行为有重合之处。
作为本文范围内的有效定义,机器人是一个自主或者半自主的主体,在人类的直接控制下进行工作;或者是部分自主,由人类监督并由人类监督训练;或者是完全自主。我们会发现这个定义并不完善,随着我们朝着基于智能体的机器人的更新领域前进,这个定义将被修正。
艾伦·图灵在20世纪30年代末提出了早期的人工智能概念,以及他称为自动机的假设模型,之后被命名为图灵机。这是中央处理器的骨架,促进了计算机在战后时代的设计。在McCarthy、Minsky、Newell和Simon的开创性努力下,这些早期的概念形成了一门新兴学科。
人工智能可以分为以下7个分支:
1. 知识表示
机器人如何表示世界?在人类环境中,对于简单的工作,比如定位,我们倾向于用地图或地标并依靠之前的知识和经验。
机器人则用激光或声呐来做这件事,现实世界里的一张桌子将被转换为一个与传感器感知强度相对应的数字数组。如果机载微处理器不是很强大,这些方法会根据维度进行近似,把物体缩小成各种各样的立方体、长方体等,就像一个缩小版的世界。
2. 自然语言
语言是独一无二的,因为这种句法和语义结构的统一只存在于人类而不存在于动物身上,语言是我们文化和社会体系的决定性基础。著名的语言学家Noam Chomsky认为,语言处于两个突出的认知过程的接合处:它是外化的感觉运动,是更有目的性和协商式的概念化心理过程。
让机器人理解并回应人类的声音仅仅在设计和开发更复杂的机器人当中发挥作用,这些机器人可以和人类社会紧密互动。自然语言处理库和聊天机器人很具发展前景。基于语音的系统仍然在探索中,苹果的Siri、微软的Cortana、谷歌的Google Now都是很具前景的。
3. 学习
在编程机器人时,会带有很多任务特定的策略,但是这些并不详细,而且为了能有效地运行,机器人必须从经验中学习。流行的学习范式有基于案例的方法、人工神经网络、模糊逻辑以及进化方法。几乎所有最先进的机器人都有一个学习模块。
4. 计划和问题解决
制订计划或者算法步骤去完成一个目标并解决过程中遇到的问题的能力是AI智能体所固有的,并且通常是它们运行表现的一个标志。对于简单的机器人来说,计划大多是运动规划。然而,更有意思的任务也需要计划,如解决魔方问题、下棋、玩滑块拼图、堆积木、制定日常家务日程表等。
5. 推理
从不完整或不准确的数据集中得出结论。机器人经常从传感器得到不准确的数据。为了应对这种情况,避免系统完全崩溃,机器人必须依赖推理,确保过程的连续性。
6.搜索
对于机器人通常意味着在物理空间中进行搜索——搜索一个物体或一个目标点,但也可以意味着启发式的搜索,机器人以分析的方式搜索解决方案。
7. 视觉
已经成为机器人的一个主要部分。对人类来说,和其他感官相比,视觉是独一无二的,和我们的大部分运动动作都相关,这一点同样适用于大部分动物世界。因此发明能够处理其本地环境的智能模型的努力必须诉诸视觉。
心理学家认为,视觉影响着我们的内心世界,而几乎我们的每一个行为结果都会先在内心世界中进行模拟,然后才在真实世界中做出行动。
自Gibson和随后的Marr的早期先驱研究开始,视觉在人工智能中就占有重要的一席之地。视觉不像其他感官,“看”和“看见”的融合似乎是一个协商式过程,涉及我们大脑的快速处理。但是最近,动作性模式已经将视觉作为一种开发性感觉运动模型。
02 什么是“智能体”
术语“智能体”可交替地用于机器人、程序、行为、动画角色等,并可以表示软件和硬件实现。Russell和Norvig将智能体限定为一个抽象实体,通过传感器感知环境,通过效应器作用于环境。移动机器人研究中“自主智能体”这个术语非常普遍,自主更多是根据情境或者根据行为定义。
松散自主也就意味着不需要其他实体进行输入,也不需要其他条件保持其运行。机器人能够在动态环境中感知和行动,以实现给定的和隐含的目标,而且它们可以在没有任何外部干预的情况下持续工作很长一段时间。
在Russell和Norvig确认了感知和行动之间的联系的基础上,Franklin和Graesser为自主智能体提出了如下定义:
自主智能体是一个位于环境中并且是这个环境的一部分的系统,它能够感知环境,并随着时间的推移对其进行作用,以追求自己的目标,从而影响其未来的感知。
这里智能体是环境的一部分,并在交互的基础上成长,如图2.1所示。这条思路引出了一个分类,由Luck等人提出,如图2.2所示。
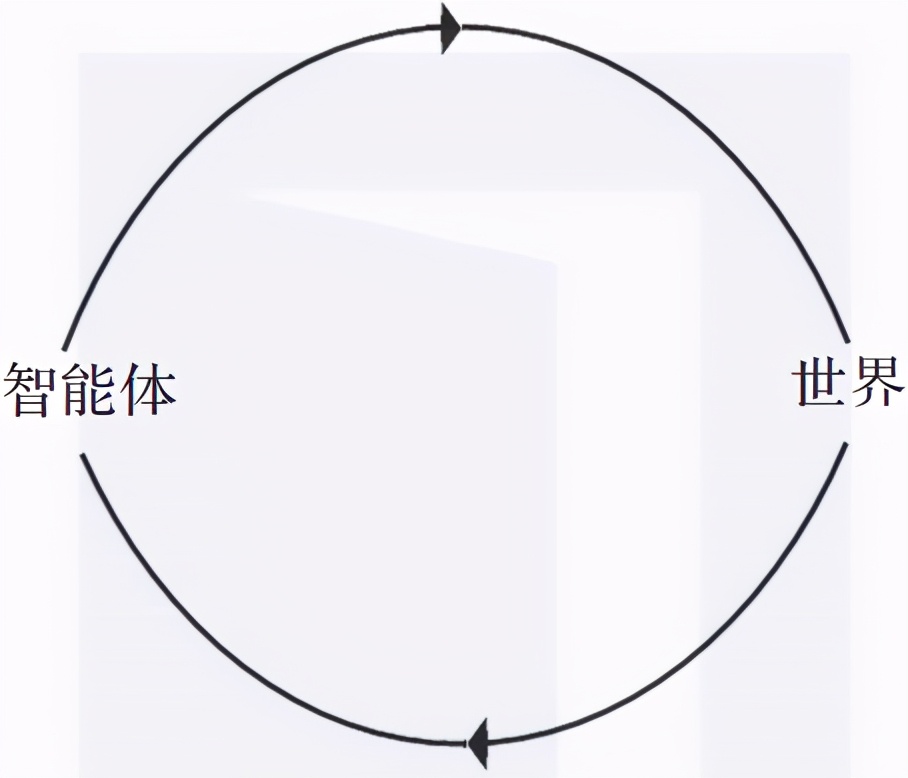
▲图2.1 智能体—世界循环。智能体与世界循环地交互:智能体作用于世界,世界的改变影响着智能体的感知
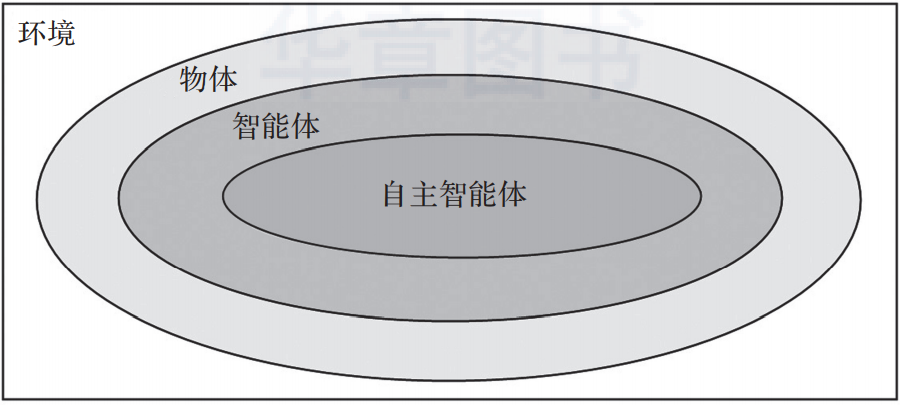
▲图2.2 自主智能体定义,改编自Luck等人
然而,因为主体是基于环境的,对智能体和非智能体的严格分类,就算不是重复的,也是不必要的。每个智能体都位于世界之中,也是这个世界的一部分。它能够和世界交互,改变这个世界以及自身的认知。请注意区分软件智能体和程序。
举例来说,打印一行文字的程序不算是智能体,因为它是在来自用户的输入上工作的。它没有任何与环境(在真实世界中)或其他程序(在软件世界中)交互的设备。它的输出也不会影响之后运行的程序,它只运行一次就会停止,缺乏时间的连续性。
电脑游戏里的角色(如Pac Man中的幽灵)就是智能体,因为它们有自己的感知,并且有意识地与世界(Pac Man二维宇宙)交互,玩家的每一个动作都会产生相应的结果,而这些结果又会激活来自幽灵的动作,从而动态地改变环境,并且一旦运行,游戏角色就会一直执行它们的任务,直到游戏结束。
快速浏览一下已有的各种各样的智能体定义是很值得的。最早的定义之一是由着眼于移动智能体技术的Virdhagriswaran提出的:
术语智能体用于呈现两个正交概念。第一个是智能体的自主执行能力,第二个是智能体执行面向领域的推理的能力。
Russell和Norvig承认感知和行动之间的联系:
自主智能体是一个位于环境中并且是这个环境的一部分的系统,它能够感知环境,并随着时间的推移对其进行作用,以追求自己的目标,从而影响其未来的感知。
Maes从机器人学家的角度,增加了智能体对一组目标的内在追求:
自主智能体是存在于一些复杂动态环境中的计算系统,在环境中自主感知和行动,由此实现为它们设计的一组目标或者任务。
Hayes-Roth的定义将智能体交互看作是感知、行动和推理的重叠:
智能化智能体持续地执行3个功能:环境中的动态条件感知,行动以影响环境中的条件,以及推理以解释感知、解决问题、进行推断和决定行动。
这些定义还可以进一步扩展,即:
- 如大部分移动机器人那样,作为认知智能体,有从世界感知信息的能力;
- 与大量智能体协调一致工作,形成集体动力,就像在机器人组和群体机器人中那样;
- 表现出很强的自主性、意向行为以及对定义道德行为能力(人工道德主体,Artificial Moral Agent,AMA)的责任的关注;
- 能够构建两个或两个以上事件的因果关系以及表现意识相似性的能力,这些都会引出有意识的主体。
关于作者:阿卡普拉沃·包米克(Arkapravo Bhaumik),拥有伦敦国王学院的机电学高级学位,研究兴趣为移动机器人、群体机器人以及人机交互。他也热衷于开源哲学和Linux,喜欢花时间设计和写作关于AI和机器人的东西。他当下的机器人和模拟中已经应用了ROS,而在机器学习方面的研究则是使用SVM来检测人脸中的情感,在自然语言处理方面的探索使用的是Python NLTK。
本站部分文章来自互联网,文章版权归原作者所有。如有疑问请联系QQ:3164780!