
1959年,诺贝尔物理学奖得主理查德·费曼(Richard Feynman)在加州理工学院作了一场题为“There is Plenty of Room at the Bottom”(底层研究仍有广阔天地)的演讲,首先设想了体内微型机器人的可能性。
在费曼的猜想中,这类微型机器人依靠微机电系统(Micro-Electro-Mechanical System, MEMS)驱动,能够进入体内实施手术。当时,费曼说:「如果我们能够吞下一个外科医生,那么很多复杂的手术都可以变得很有趣、很简单。」
或许是费曼的影响力太大,十年后,科研界还未开展研究,美国导演 Richard Fleischer 就将费曼的设想拍成了经典的科幻电影,《神奇旅程》(Fantastic Voyage)。电影中,5名医生被缩小成原体积的几百万分之一,被注射进一位脑血管遭到破坏、性命攸关的患者体内,经过一系列冒险,最终成功找到出血点,及时挽救了病人的生命。
但,能够进入人体的微型机器人,只能是一个幻想吗?答案显然存疑。
自费曼提出「体内外科医生」的概念以来,科学家们便被这一想法所吸引、激励,投入到微型机器人的研究中,并取得了许多不错的成果。科学家们畅想着,在未来,机器真的可以进入人的体内,实现靶向治疗、靶向给药,帮助治疗肿瘤等重大疾病。
1、「史莱姆」机器人
前段时间,一个叫做「史莱姆」(Slime)的磁控粘液微型机器人在 New Scientist 上火了。
它是由磁性粘液材料制作而成,可以进入体内,取出意外吞噬的小器件。4月1日一发布,立即在科技社区引起巨大轰动,网友纷纷惊掉下巴,浏览点击率迅速超过十万、百万、千万:


与我们常见的机器人不同,这个机器人无论是外形、动作与能力,都更像一个「怪物」,与我们所想象的由刚体硬件打造、五官身躯酷似人类的「机器」「人」有很大的出入。
根据 Demo 显示,它的外形像一坨乌黑的面团,没头没脸、没手没脚,身躯柔软,外形变化多样。
但虽然其貌不扬,这个「史莱姆」机器人却具备多种奇特的功能,可以变化自己柔软的身躯,在穿越窄缝、修补断开的电线,还可以在人体的消化道内以吞噬的方式取出误食的电子零器件。
即使将它切成几段,再重新拼接,它也有「自愈合」的能力。
「史莱姆」机器人打破了大多数人对「机器人」的传统印象,也凭借其酷炫的未来感与潜在的强大力量,让「体内微型机器人」进入大众的视野。
「史莱姆」机器人的研发成员之一、香港中文大学张立教授介绍,「自愈」能力也是当前软体机器人领域的热门研究方向之一,主要体现为对不同环境的高适应性。而「史莱姆」机器人的强大之处,不仅在于将它切断后、它可以自愈合,还在于将它放到液体中也能保持完整形状,甚至在空气、固体环境中也能穿行无阻。
图注:香港中文大学机械与自动化工程学系教授张立
事实上,近年来微型机器人的研究成果层出不穷,如由微电机驱动的、大小如飞蝇/甲壳虫的飞行机器人。而与它们不同,「史莱姆」机器人的独特之处是在非牛顿液体材料中加入磁性粉末与磁性颗粒,从而实现磁场控制,使其行动灵敏、甚至可以自由变形。
而「史莱姆」机器人所呈现出来的「自愈」能力,也是依托材料本身的特性,加上外界的磁性引导,在「身体」切断后由相距较近的高聚物相互作用,重新融为一体。
需要注意的是,「史莱姆」机器人目前没有自主移动的本领,它的移动伸缩靠的是外部磁场控制里面的钕磁铁(可以理解为「强力小磁球」)。
「『史莱姆』机器人本身没有固定的形状。它是粘液状的,加了磁场后,它会对磁场作出响应。你将磁铁由左往右移动,它就会随着磁铁从左往右。受磁力的大小,它很容易产生形状的变化。例如,如果有人不慎误吞有害元件,把它变成一只手、包裹抓取。」张立向AI科技评论介绍。
这也是张立所领导的先进纳米材料与微型机器人实验室(Advanced Nanomaterials & Microrobotics Laboratory,ANML)第一次制作磁性粘液机器人。此前,ANML曾制作过许多不同类型的微型纳米机器人,包括3D技术打印的仿生昆虫机器人,均是基于磁场进行远程操控,「但像『史莱姆』机器人这样的粘液状、有如此大变形的,可以像大象的鼻子一样卷起来的,还是第一次。」张立谈道。
更令人惊叹的是,该工作的第一作者、ANML实验室在职博士后孙猛猛从加入ANML、开始研发到发表文章,仅用了半年时间。

图注:孙猛猛博士
「这主要是因为孙猛猛原先在哈尔滨工业大学读博(师从谢晖教授)时就已经有一些想法。过来后,借助我们课题组在相关材料与磁控操作上所积累的大量经验,项目进展得很顺利。」张立介绍。
考虑到人体内部环境的复杂度,张立团队设想,「史莱姆」机器人或许能在消化道有一定的应用空间,原因主要有几点:一是消化道的空腔较大,「史莱姆」机器人在里面的穿梭会比较顺畅;二是人体的消化道本就有许多微生物菌群,尝试体内机器人的风险相对低;三是「史莱姆」机器人的制作材料经过细胞毒性测试,毒性较低,若只在体内短暂停留、后排出体外,理论上是安全的。
当然,目前将「史莱姆」机器人作为体内医治执行器的想法仍处于一个设想阶段,有待进一步探索。
2、体内微型机器人的发展
「史莱姆」机器人的表现可喜,但回溯这种能够进入体内的微型机器人的发展历史,不过短短数十载。
上世纪七十年代,美国情报机构为推进机密研究,试图设计一些能够执行战俘援助和电子拦截任务的微型机器人,但由于当时底层支持技术未完全开发出来,微型机器人原型并没有从这套早期的计算和概念开发出来。
直到21世纪,微型机器人才正式面世。随着微机电、微驱动器等多学科领域的发展作为铺垫,微型机器人取得重要技术突破并逐渐成为国际研究热点。

图注:仿生微型机器人
相对于研究了大半个世纪的大型机器人来说,微型机器人的发展不过二十余年,「能够进入体内的微型机器人」更是屈指可数,国内外均处于刚刚起步的阶段。
微型机器人有不同类别,其中,微型医疗机器人被业界认为最有发展前途的应用领域。日本科技政策研究院曾预测「未来医疗领域使用微型机器人和机器人的手术将超过全部医疗手术的一半」。
在国外,日本率先采用「机器人外科医生」的计划,并正在开发能在人体血管中穿行、用于发现并杀死癌细胞的超微型机器人。美国马里兰州的约翰·霍普金实验室研制出一种装有微型硅温度计和微型电路的微型检测装置,吞入体内,可以将体内的温度信息发给记录器。瑞典科学家发明了一种大小如英文标点符号的机器人,未来可移动单一细胞或捕捉细菌,进而在人体内进行各种手术。
国内研究员也早早关注到这一前沿方向,如苏州大学的孙立宁教授、沈阳自动化研究所的刘连庆教授。在「体内机器人」一块,青年学者如香港中文大学教授张立、深圳先进院研究员徐天添,也不甘落后,从材料与控制两大方向入手,探索新的机遇。
总的来说,体内机器人的实现,有三大要素:一是「微」体形的实现;二是与体内环境相适配的安全材料;三则是机器人在体内的「自动驾驶」技术。
就拿「史莱姆」机器人来说,其最大的突破就是材料。它采用了具有非牛顿流体特征的聚乙烯醇与硼砂材料、外加一层二氧化硅,其黏稠度随着与外界的接触产生变化,对环境具有高适应性,在气态、液态与固态环境中均可延伸爬行,可进行多模态操纵。

图注:在池内倒入非牛顿液体可进行水上漂
不过,硼砂的毒性安全度仍未得到保障,该领域目前研究的一个重点就是找出更适合构建微型医疗机器人的材料。材料要具备柔性化、亲肤化、无毒无害、易于排除体内、便于操作等特点。
对于创新性与安全性,张立教授的看法是:「有时科学家跟医生的想法不尽相同。医生往往比较保守,往往首先考虑安全性,而科学家更多强调创新性。这两者有一定矛盾。」但在医疗场景中,毋庸置疑,安全必然是第一位。
除材料以外,对微型机器人的体内路径控制又是实现「外科医生」另一亟待解决的难题。近年来,体内微型机器人的研究重点经历了三个阶段的变化:从开环控制到闭环控制、从单一运动模态到多种运动模态、从单个机器人到多个机器人。对微型机器人集群的操控,在体内医疗场景中有实际的应用价值,也是目前机器人领域的一大研究趋势。
与单一机器人相比,集群微机器人有两大优势:
一是减少失败率。比方说,对于载药来说,集群机器人的载药剂量可以提高。此外,在血液等环境中,单一的微小机器人很容易被血液冲走,或被巨噬细胞吞噬,这时若切换为集群机器人,可以提高治疗的成功率;
二是集群便于观测。如今的机器人可以做到纳米尺度,但当它们放于在体内时,用现有的医疗影像设备清晰观测到单一机器人的难度极高。就像潜水,我们往往容易忽视从眼前游过的一条小鱼,却常常被远处一群黑压压的鱼所震撼到。
3、路径控制:体内「开车」
在微型机器人的路径控制方面,中国科学院深圳先进技术研究院(简称「深圳先进院」)的研究员徐天添是一枚科研「新星」。
徐天添是自动化控制背景出身,先后在在巴黎中央理工大学与巴黎第六大学获得硕士、博士学位,从博士期间开始研究微型机器人。2014年博士毕业后,她加入香港中文大学张立教授团队担任博士后研究员。2016年,她正式加盟深圳先进院集成所智能仿生中心,目前是深圳先进院唯一一位研究医疗微型机器人路径控制的科学家。
图注:深圳先进院徐天添研究员
从徐天添教授的角度看,体内微型机器人的路径控制研究大约可以分为三个方向:一是如何让微型机器人在体内动起来?二是如何让它们按照既定的路径运动?三是如何让它们适应体内的复杂环境?
如果将微型机器人比喻成汽车,那么,机器人在体内悬空运动,就相当于控制一辆汽车在复杂闹市的空中行驶,难度极高,安全风险因素也极高。
需要注意的是,微观世界的许多物理定律与宏观世界不一样。例如,1976年,诺贝尔物理学家 E.M.Purcell 提出「扇贝定律」(scallop theorem),即扇贝在把贝壳迅速打开、再慢慢关上时,由于惯性,扇贝迅速打开的时候会往前一窜,形成一窜一窜地「运动前行」。然而,在微观世界里,由于惯性力在黏性面前几乎可以忽略不计,扇贝的开合行动也无法使它前行。

人体的体内环境也是一个微观世界。如何让微型机器人在体内动起来?
徐天添与团队合作,从自然界中汲取灵感:一种是大肠杆菌,由螺旋形的尾巴驱动前进,就像拧一颗螺丝,一边转、一边前进;另一种是精子柔性振动,通过拍打自己的尾巴,振动前行。在这两种方式下,他们成功地制造出螺旋型机器人与精子状的仿生机器人,成功使机器人在模仿体内的环境中动了起来。
图注:微型机器人在液体中「螺旋泳」前进
但是,光让机器人在体内动起来还不够。必须保证前行的路径是安全的,且不能在体内横冲直撞……
因此,为了保证机器人在体内「精准」穿梭,绕过危险区域,确保安全性,研究微型机器人的路径控制显得尤为重要。且如前所述,机器人在体内的运行是「空中前进」,这就要求机器人具备 3D 运动能力。
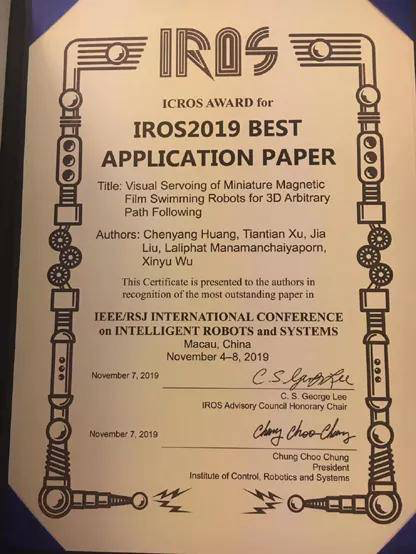
2019年,徐天添团队便提出了一种新型的路径跟随控制算法,采用路径微分法,把给定的任意路径微分成各个小段,让它在每一个点找它最近的小段,来控制它的前进方向。他们的算法针对毫米级的磁驱动软体机器人成功实现了 3D 路径控制,相关工作获得了IEEE智能机器人与系统国际会议(IROS)最佳应用论文奖:
在路径控制一块,徐天添团队采取的也是磁控。磁控的主要优势在于可以无线操控:若机器人进入体内,人类研究员或医生可以在体外实施操作。同时,磁控的响应时间短、功率密度高,可重复性也高,机器人可以多次成功地到达病灶部位,消除成功率的随机性。
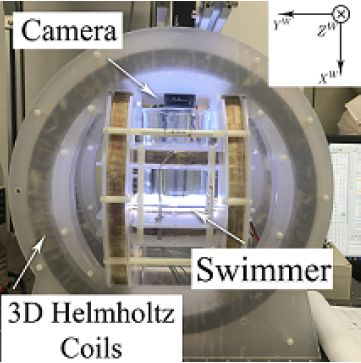
图注:徐天添团队的多自由度磁控装置
实现单一机器人的3D路径控制后,徐天添与团队又向多机器人的协同控制研究迈进。
徐天添向AI科技评论解释,基于磁控的微机器人群操作有两大难点:一是同一个磁场里所输入的信号是相同的,这会导致多个微型机器人的前进方向与速度一致;二是微型机器人之间缺乏通讯,无法独立控制。
为了解决这个问题,徐天添与团队钻研多年,终于在今年年初取得了成果——
他们提出一种完全解耦的方法,无须通讯,用外部的统一信号来感知机器人,解决如何对相同的信号产生不同的输出的问题,首次实现了4个磁性软体微型机器人的独立位置控制和3个磁性软体微型机器人的独立路径跟随控制,相关工作(“Independent Control Strategy of Multiple Magnetic Flexible Millirobots for Position Control and Path Following”)发表在国际机器人顶刊 T-RO 上。
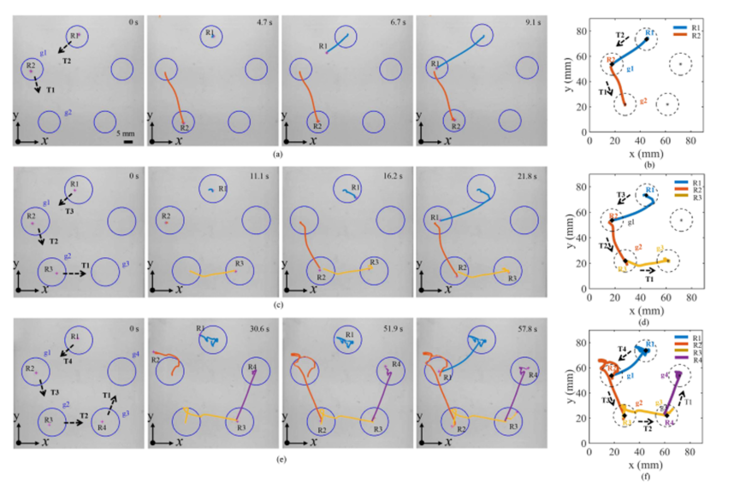
图注:毫米级机器人的独立位置控制:(a)两个机器人位置控制;(c)三个机器人位置控制;(e) 四个机器人位置控制;(b)、(d) 和 (f) 为机器人的对应的位置轨迹
这个工作在多微型机器人的协同控制上迈进了一大步。不过,徐天添也向AI科技评论表示,目前他们也只实现了4个微机器人的独立控制,在未来,还要朝着更大的目标前进。
值得注意的是,在路径控制一块引入人工智能算法,也正在成为趋势。例如,徐天添等人便从2020年开始采用华南理工大学计算机学院院长陈俊龙在2016年提出的「宽度学习」方法,自动计算与优化对机器人在复杂环境中的控制率,从而实现更好的控制。
4、设想与现实
那么,距离微型机器人进入体内还有多久?
毫无疑问,费曼的猜想很前卫,「体内外科医生」的设想也令人十分神往。
前段时间,Nature也发文探讨了微型机器人用于癌症治疗的前景。比如,抗癌药物通常采用散弹枪方法,传统治疗方法在静脉注射凝血药,但会面临血栓风险。而化学疗法在破坏肿瘤的同时,不可避免地附带攻击健康细胞,引发一系列副作用。而针对这个困境,梦寐以求的替代方案是将一个微型机器人注射到患有癌症的人体内进行靶向治疗和给药。
遥想微型机器人在有朝一日能够进入体内进行癌症医治,张立有着极大的研究热情与动力。但同时,研究人员也清醒地意识到:体内微型机器人的落地还有很长的路要走。比如,至今国内外都还没有研究人员真正将微型机器人在体内落地。
安全、伦理、性价比、风险控制等等,均是人们在未来要解决的问题。
在推动体内机器人的研究与落地上,科学家在努力。张立向AI科技评论表示,近年来,香港政府投资了4.7亿港币在香港科学园建设了一个医疗机器人创新技术中心(如下图),配备了技术先进的医疗影像设备、磁力共振技术与X光等等,帮助科学家们进行医疗机器人的创新与技术孵化。

图为张立教授提供
「从科学研究的角度上说,我不觉得『史莱姆』机器人是具有里程碑意义的创新。」张立谈道,「我们更希望实现的是赋予微机器人智能性,在微机器人的集群和控制系统上有所突破,让器件更安全、更小型化、更智能化,然后找到它在医学上的应用出口,最终的目的,是要造福人类。」
也许,费曼在上世纪50年代提出的「体内外科医生」的设想在不远的时日就会实现,未来它可以应用到人体任何部位,如眼底、视网膜、胃肠道、膀胱或血管。
让我们一起期待这一天可以早点到来。
本站部分文章来自互联网,文章版权归原作者所有。如有疑问请联系QQ:3164780!